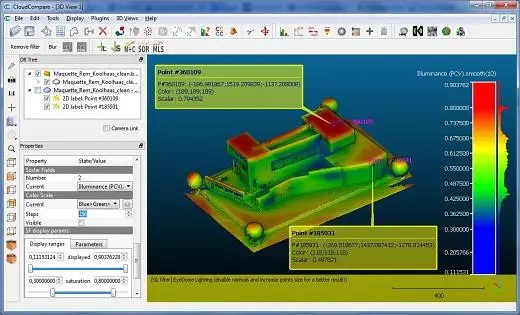
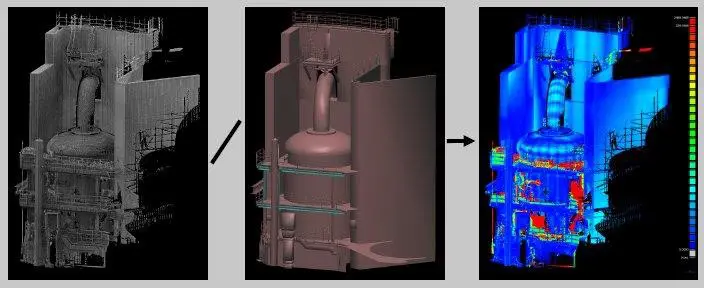
CloudCompare는 3D 포인트 클라우드 (및 삼각 메쉬) 처리 소프트웨어입니다.원래 3D 포인트 클라우드 간의 비교 만 수행하도록 설계되었습니다.특정 기능에 비해 뛰어난 성능 (1)을 가능하게하는 특정 옥트리 구조에 의존합니다.데이터 속도가 빠른 3D 레이저 스캐너로 포인트 클라우드를 인수 한 결과 CloudCompare는 표준 랩톱에서 거대한 포인트 클라우드 (일반적으로 1000 만 포인트 이상)를 처리해야했습니다.포인트 클라우드와 삼각 메쉬 사이의 비교가 빠르게 포함되었습니다 (아래 참조).그 후 포인트 클라우드 처리를위한 많은 알고리즘 (등록, 리샘플링, 색상 / 정상 / 스칼라 필드 관리, 통계 계산, 센서 관리, 대화식 또는 자동 분할 등)과 디스플레이 향상 도구 (사용자 정의 가능한 색상 램프, 색상)가 통합되었습니다.및 일반 벡터 처리, 보정 된 사진 처리, OpenGL 고급 셰이더 및 기타 플러그인) ....
웹 사이트:
http://www.danielgm.net/cc/카테고리