0
Open Dynamics Engine
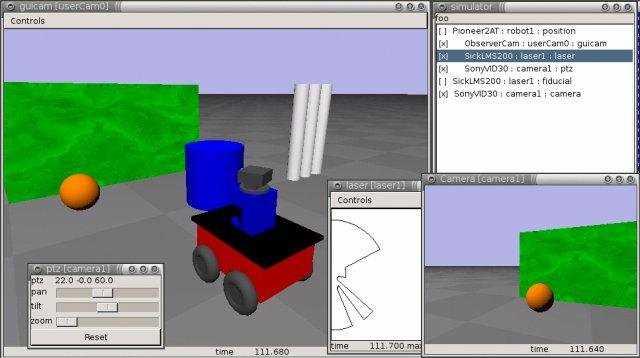
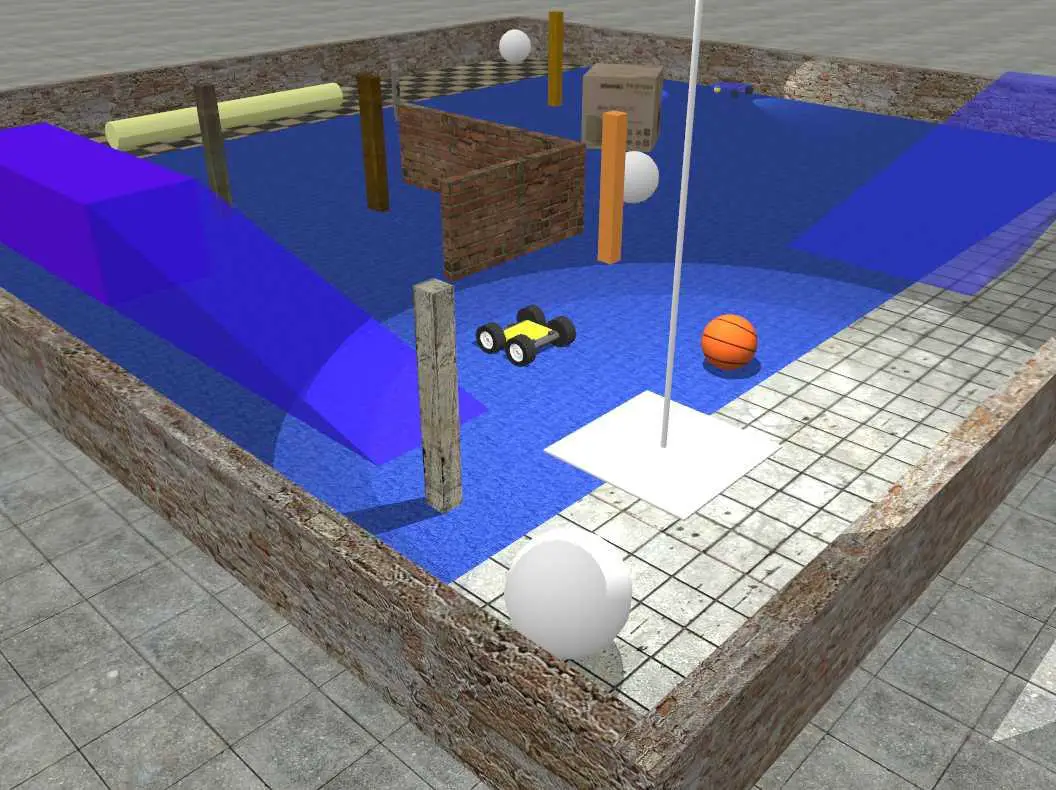
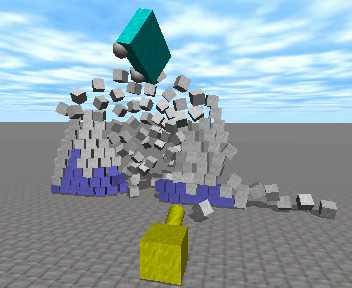
ODE는 강체 동역학을 시뮬레이션하기위한 오픈 소스 고성능 라이브러리입니다.사용하기 쉬운 C / C ++ API로 기능이 완전하고 안정적이며 성숙하며 플랫폼에 독립적입니다.
ODE는 강체 동역학을 시뮬레이션하기위한 오픈 소스 고성능 라이브러리입니다.사용하기 쉬운 C / C ++ API로 기능이 완전하고 안정적이며 성숙하며 플랫폼에 독립적입니다.이 제품은 고급 조인트 유형과 마찰을 통한 통합 충돌 감지 기능을 갖추고 있습니다.ODE는 차량, 가상 현실 환경의 객체 및 가상 생물을 시뮬레이션하는 데 유용합니다.현재 많은 컴퓨터 게임, 3D 제작 도구 및 시뮬레이션 도구에서 사용됩니다.
웹 사이트:
http://www.ode.org/카테고리







Linux 용 Open Dynamics Engine의 대안
1
IUP Portable User Interface
IUP는 그래픽 사용자 인터페이스를 구축하기위한 다중 플랫폼 툴킷입니다.C, Lua 및 LED의 세 가지 기본 언어로 간단한 API를 제공합니다.
0
ReactPhysics3D
ReactPhysics3D는 3D 시뮬레이션 및 게임에 사용할 수있는 오픈 소스 C ++ 물리 엔진 라이브러리입니다.
0
0
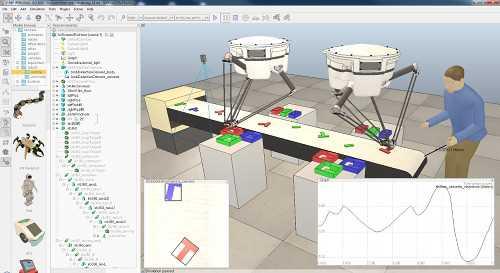
Project Chrono
Project Chrono는 C ++의 플랫폼 독립적 인 오픈 소스 디자인을 기반으로하는 물리 기반 시뮬레이션 인프라입니다.